驱动电路中的环形分配器目前已很少再用分立元件构成;各种步进电动机(三相、四相、五相)环形分配器的集成电路市场上已有销售。当然,也可以直接通过计算机编程来实现脉冲信号的分配。信号的发生及分配均由计算机承担,即由计算机和编程来实现的,一般故障较少。而功率放大器部分
的故障较多,接口电路部分的可靠性由设计合理性、元件抗力来保证。
驱动电路一般都有指示灯显示装置并采用了过电、过压、过流等保护措,可靠性较高。当故障发生时,应先从功放电路级开始检查,然后逐级向前排查原因,排除故障后合闸运行。故障可从静态、动态两方面分析,静态是指电机各相励磁绕组直通额定电流(按规定的分配方式),会出现3种情况。
(1)某相或某几相无电流。这时应检查连接线是否松开,功率级有无虚焊;熔断器或功放管是否烧断。这类故障很容易排除,即重新连线,将其焊牢或更换元件。
(2)有电流但电动机产生摆动,不能正常走步。存在两种可能:一种是环形分配器工作不正常,产生错乱;另一种是电动机绕组的相序接错。
(3)电流达不到额定数值或各相电流不平衡。这是由于主回路中各相绕组参数不一致而造成的。主回路中包括电动机绕组、限流电阻、晶体管等元件。这些元件参数、特性应做到尽量一致,否则严重不对称时会产生大、小步运行,引发故障。
以上静态故障可用秒信号送给电机单脉冲走步,在各相绕组中串联直流电流表进行观测。电流表指针摆动规律应与分配器相序一致;各相电流应平衡并达到额定电流值。
动态故障检查需采用多线示波器,观测各相电流波形。驱动电路的类型不同,其电流波形也有所不同,见图3—5 32。要求各相电流波形应尽量一致。若波形相差甚远,可以检查主回路中的晶体管以及放电回路的元件参数是否符合要求。放电回路直接影响电流波形的后沿,各相放电二极管的开关
时间应基本相等。
(二)步进电动机的故障分析及维护
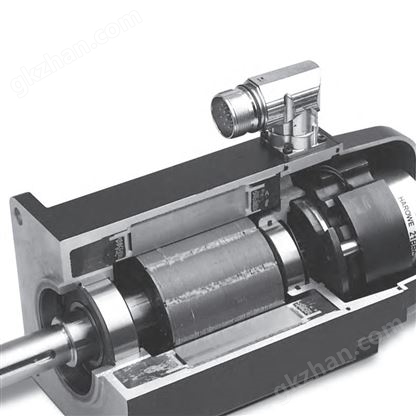
步进电动机属于精密器件,机械加工精度较高。例如:磁阻式步进电动机的单边气隙只有0.03~O 08mm,永磁步进电动机的磁钢性能也要求很高,一旦退磁后,必须重新充磁。步进电动机常见的故障有下列3种:
1温升过高
下列几种情况将使步进电动机温升过高:
(1)工作方式不符合技术要求,如三相六拍工作的电机改为双三拍工作,温升要变高;
(2)高、低压供电的驱动电路在高频工作时,高压脉宽不能太宽,应按技术标准调整,否则温升也会高;
(3)环境温度过高,散热条件差,安装接触面积不符合标准;
(4)驱动电路发生故障,电动机长期工作在单一高电压下或长期工作在高频状态,同样要使电动机的温升变高。
2电动机运行不正常
运行不正常是指电动机不能启动、产生失步、超步甚至停转等故障。其原因是:
(1)工作方式不按规定标准。例如:四相八拍电动机改为四相四拍运行,产生振荡或失步;
(2)驱动电路参数与电动机不匹配,达不到额定值要求;
(3)驱动电路的电压偏低;
(4)电动机束装配好,定、转子间划碰、扫膛;
(5)存放不善,定、转子表面生锈卡住;
(6)接线不正确;
(7)负载过重或负载转动惯量过大;
(8)环境尘埃过多,被电动机吸人使转予卡死;
(9)传动齿轮的间隙过大,配合的键槽松动而产生失步;
(10)在电机振荡区范围运行;
(11没有清零复位,环形分配器进入死循环;
(12)转子铁心与电机转轴配合过松,在重负载下,铁心发生错移而造成停转。
3噪音振动过大
其主要原因有以下几种:
(1)在共振频率范围工作;
(2)阻尼器未调好或失灵;
(3)轴向间隙过大;.
(4)纯惯性负载,正反转频繁;
(5)传动齿轮间隙过大。
永磁式或感应子式步进电动机由于磁钢发生退磁,也都会出现上述各种故障。
电动机出现故障时可先与制造厂家联系,更换电动机或主要零部件,而不要自己轻易拆卸。电动机制造厂按照严格的工艺规范进行生产,保证定、转子闽有较高的同心度和较小的定转子气隙。有的电动机采用灌注环氧树脂,装配后不宜再拆卸,修理也很困难。有时出现转子生锈、转轴磨损或断
裂情况,只需要换转子就行了。如果是阻尼器调整不合适,则用户可以自行处理,重新调整阻尼器。